Les aspects virtuels de la réalité virtuelle moderne s’améliorent constamment, mais elle ne correspond pas tout à fait à l’étiquette de réalité sans sensations tactiles. Pour y remédier, une équipe d’ingénieurs de l’université de Cornell (États-Unis) a créé un capteur à fibre optique qui combine des LED et des colorants peu coûteux, ce qui donne une « peau » extensible qui détecte des déformations telles que la pression, la flexion et la déformation.
Source : Université de Cornell
L’équipe s’est inspirée des capteurs à fibres optiques distribuées à base de silice, qui détectent les petits décalages de longueur d’onde pour identifier de multiples propriétés, comme les changements d’humidité, de température et de déformation, afin de fabriquer un guide de lumière extensible pour la détection multimodale (SLIMS).

Source : Université de Cornell
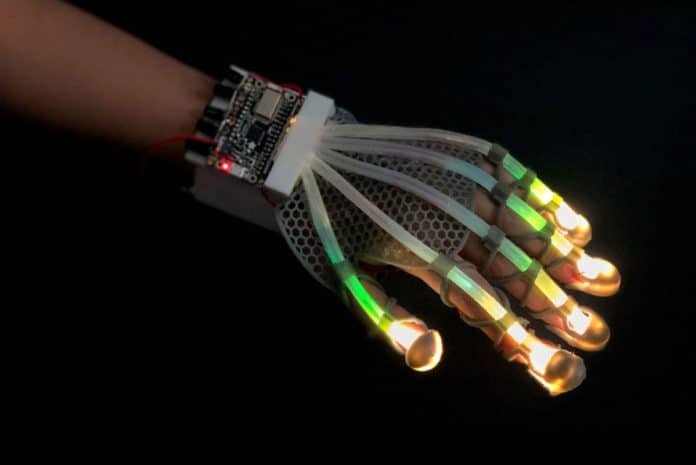
Fonctionnement du capteur de peau extensible
Dans un prototype de gant, chaque doigt a un guide de lumière extensible qui contient une paire de noyaux en élastomère de polyuréthane. Un des noyaux est transparent, tandis que l’autre est rempli de colorants absorbants à plusieurs endroits et se connecte à une LED. Chaque noyau est couplé à une puce de capteur rouge-verte-bleu pour enregistrer les changements géométriques du trajet optique de la lumière.
Lorsque vous déformez le guide de lumière en pliant les doigts ou en subissant une pression, les colorants servent de « codeurs spatiaux » qui s’allument et enregistrent exactement ce qui se passe et en précisent l’emplacement et l’ampleur. Le nouveau capteur extensible utilise une technologie assez simple et peu coûteuse. Le gant est imprimé sur une imprimante 3D et est équipé de Bluetooth, ce qui lui permet de transmettre des données au logiciel de base qui récupère les mouvements et déformations du gant en temps réel. Il est également équipé de capteurs LED intégrés et d’une batterie au lithium-ion.
« Actuellement, la détection se fait principalement par la vision », a déclaré le chercheur principal Rob Shepherd, professeur associé d’ingénierie mécanique et aérospatiale à la faculté d’ingénierie. « Nous ne mesurons presque jamais le toucher dans la vie réelle. Cette peau est un moyen de nous permettre, à nous et aux machines, de mesurer les interactions tactiles d’une manière que nous utilisons actuellement avec les caméras de nos téléphones. C’est l’utilisation de la vision pour mesurer le toucher. C’est la façon la plus pratique de le faire de manière évolutive ».
Selon les chercheurs, leur développement peut être utilisé pour améliorer les systèmes de réalité virtuelle et être incorporé dans la main d’un robot pour lui donner le sens du toucher. L’équipe envisage également l’utilisation de nouvelles technologies en physiothérapie et en médecine du sport. Le matériau qui réagit à la déformation donnera aux machines un analogue du toucher et élargira ainsi leurs capacités.
Les contenus sur les mêmes sujets :
Accessoire VR
- Accessoire VR : les contrôleurs PlayStation Move pour PSVR
- La solution WalkinVR supprime les obstacles liés au handicap physique pour les jeux VR
- Accessoire VR : Les Contrôleurs Oculus Touch
- Une fuite de iOS 14 révèle un contrôleur AR ou VR d’Apple
- Revue de la sangle de tête GeekVR Q2
- 6 meilleurs kits de nettoyage Meta Quest : Polir votre casque VR
- Accessoire : le contrôleur Microsoft Kinect
- Accessoire pour jeux VR : DualShock 4 de chez Sony
- Test du Logitech Chorus : Écouteurs hors oreille pour Quest 2
- Les prochains casques VR nécessitent un seul câble USB-C pour se connecter
- Un dispositif compatible avec la RV imite le toucher humain
- Accessoire VR : Le contrôleur VR Steam
- Les nouveaux AirPods sont le compagnon idéal de votre Vision Pro
- Les fabricants de casques qui produisent les meilleurs accessoires AR et VR
- Connectez votre esprit à l’Oculus Rift S avec l’interface Brainwave de Looxid Labs